蓝牙遥控小车,基于Arduino mini pro,使用摇杆控制
1、所需工具及组件
1.1工具列表
- 电烙铁套装
- 热熔胶
- 万用表
- 尖嘴钳
1.2组件列表
组件 型号 数量 备注 Ardunio mini pro 5V/16M 2 L298N电机驱动模块 1 带底板HC-05主从机一体蓝牙模块 HC05原装版 2 原装和非原装都可 游戏摇杆控制杆传感器 JoyStick模块 1 18650电池盒 2节带线 1 可买3节装 18650锂电池 3.7V 2000-2100HAM 2 建议买3节以得到11V电压 USB转TTL CH340G模块 CH340G 1 M3单头 六角铜柱 螺柱 M3*20+6(10个) 1 M3单头 六角铜柱 螺柱 平头螺丝M3*5(100个) 1 M3单头 六角铜柱 螺柱 六角螺母M3 内径3MM(100个) 1 杜邦线 一排40根 公对公(10CM) 1 杜邦线 一排40根 公对母(10CM) 1 杜邦线 一排40根 母对母(10CM) 1 间距2.54MM单排排针 (20个) 1*40PIN 1 Arduino MB102大面包板+电源模块 1 洞洞板 7*9cm 1 微型小船形开关 黑色2脚2档铜脚(5只) 1 智能小车底盘 强磁电机 1 两轮 小车底板 1 圆形(当作上盖,盖住接线) 下方为购买后未用到的组件(目前未使用或使用中出现问题) 18650锂电池充电板 TYPE-C USB接口 1 HC-SR04 超声波传感器 1 3.7V转12V迷你DC-DC升压模块 1 输出电流不达标 蜂鸣器 3-~12V无源通用电磁式16欧2kHz(5只) 1 MT3608 2a升压板 DC-DC升压模块 1
1.3组件介绍
1.3.1 Ardunio mini pro
特点
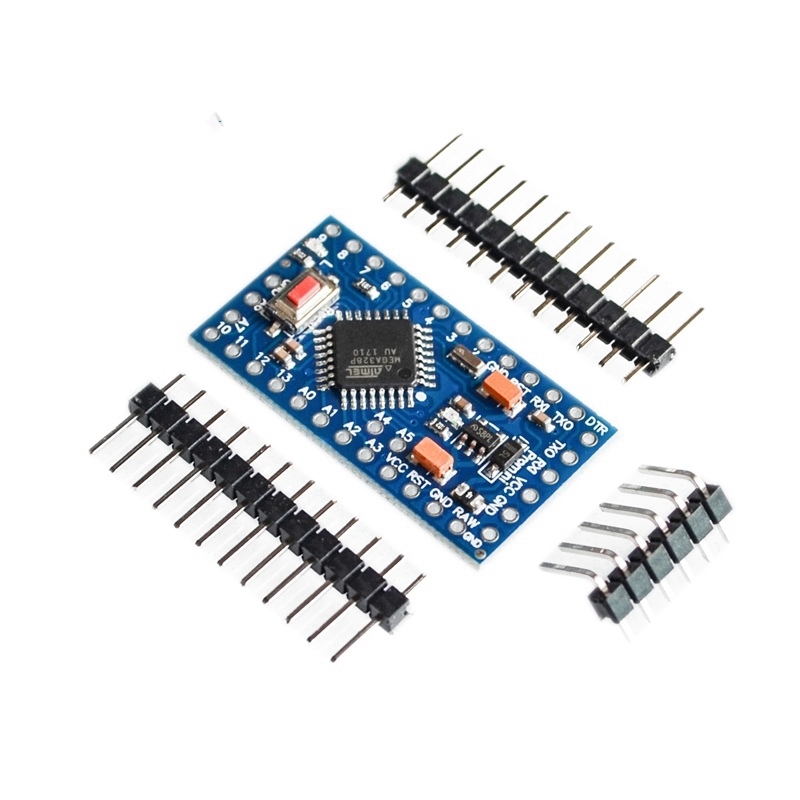
I/O图
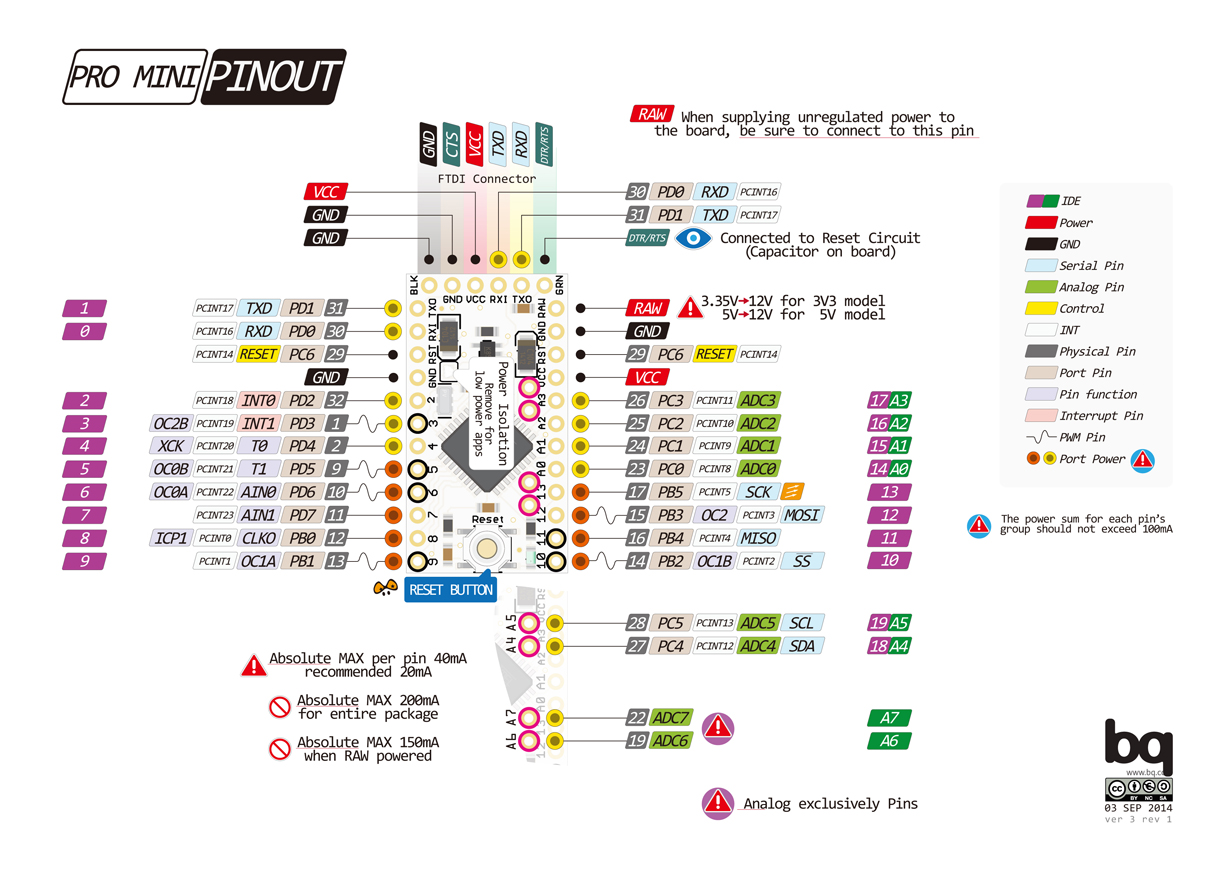
串行:0(RX)和1(TX) 用于接收(RX)和发送(TX)TTL串行数据。(一定要将其他设备的RXD、TXD分别接在pro mini 的TXD、RXD接口上,即发送对接收)
PWM: 3、5、6、9、10和11。 提供带AnalogWrite 功能的8位PWM输出。
RAW用于为电路板提供原始电压
VCC3.3V或5V电源
GND接地引脚
注意:如果使用5V电源供电则接VCC GND ,7~9V电源 RAW GND
你也可以选用Ardunio uno等其他型号
1.3.2 L298N电机驱动模块
示意图
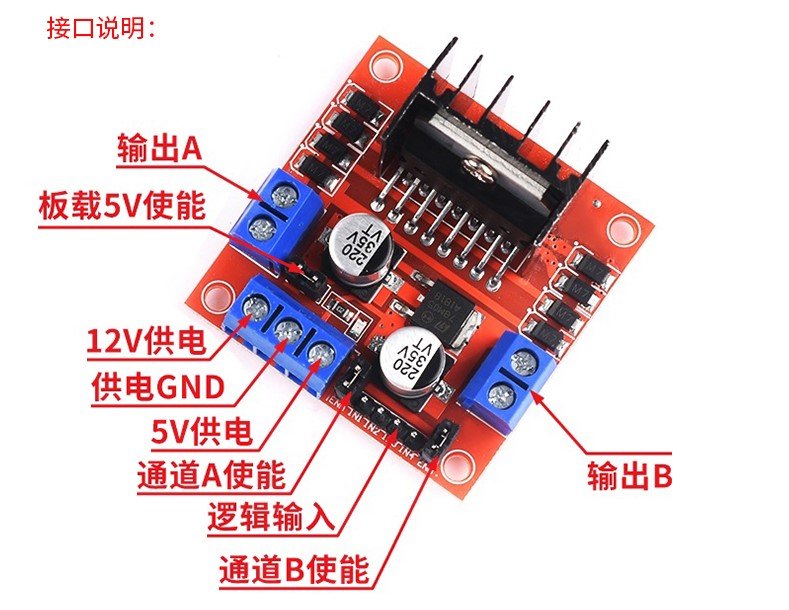
跳线帽使用说明
可以看到有3个跳线帽
板载5V使能、通道A使能和通道B使能
如果在12V供电处输入7~12V电压,可以安装上板载5V使能跳线帽,此时可以从5V供电处得到一个5V输出,可用于给pro mini 或其他组件供电。
当驱动电压高于12V,小于等于24V时,必须拔掉板载5V使能跳线帽,然后在5V供电端口外部接入5V电压对L298N内部逻辑电路供电,此时pro mini 等组件需外部单独供电。
可通过通道A使能及通道B使能这两个端口实现PWM调速(使用PWM调速时需取下跳线帽)
注意:L298N使用时需要与pro mini共地
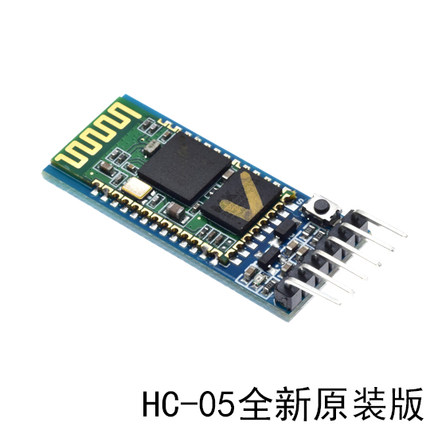
1.3.3 HC-05蓝牙模块
网上售卖的分为兼容版和原装版两种,区别不是很大,我买的时候买了一个兼容板和原装板
示意图

接线方法
| USB转TTL | HC-05 |
|---|---|
| TXD | RXD |
| RXD | TXD |
| GND | GND |
| 5V | VCC |
注意:我这里兼容版是按照表格里的接线方法接线的,使用正常。使用原装版时,按照此方法电脑提示设备运转不正常,将USB转TTL的 VCC 对应了HC-05上的 VCC后,运作正常
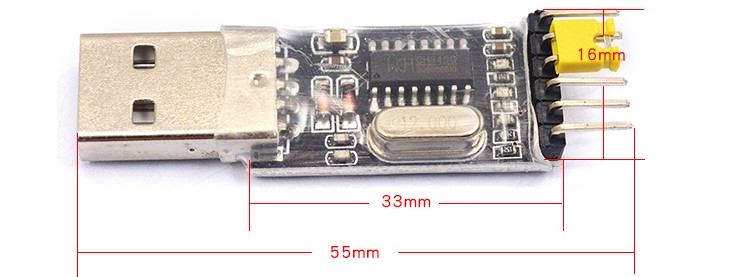
1.3.4 USB转TTL CH340G模块
示意图
驱动
1.3.5 JoyStick模块
示意图

测试方法 (X接A0 Y接A1)
#define joyX A0
#define joyY A1
int button=2;
int buttonState = 0;
int buttonState1 = 0;
void setup() {
pinMode(7,OUTPUT);
pinMode(button,INPUT);
digitalWrite(button, HIGH);
Serial.begin(9600);
}
void loop(void)
{
Serial.print(analogRead(1)); //读取摇杆Y轴的值,串口显示
Serial.print(",");
Serial.print(analogRead(0)); //读取摇杆X轴的值,串口显示
Serial.println(",");
delay(1000);
}打开串口监视器 可以看到随着摇杆的运动,数据在不断变换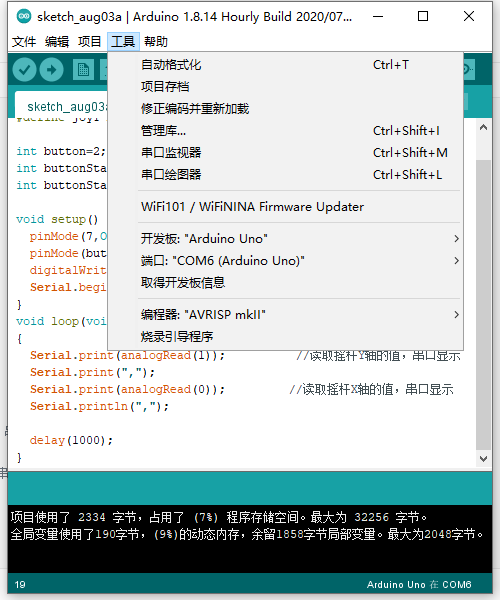
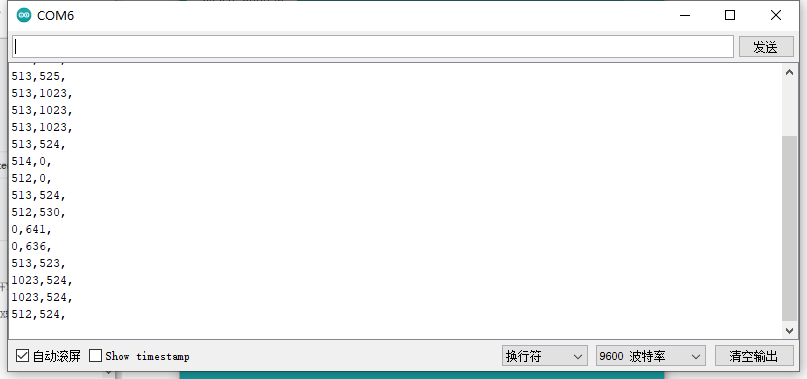
默认的位置在 513,525 左右,这是中间位置(不同摇杆这个数值可能不同)。
其值介于0到1023之间
1.3.6 小车底盘
将零件自行组装
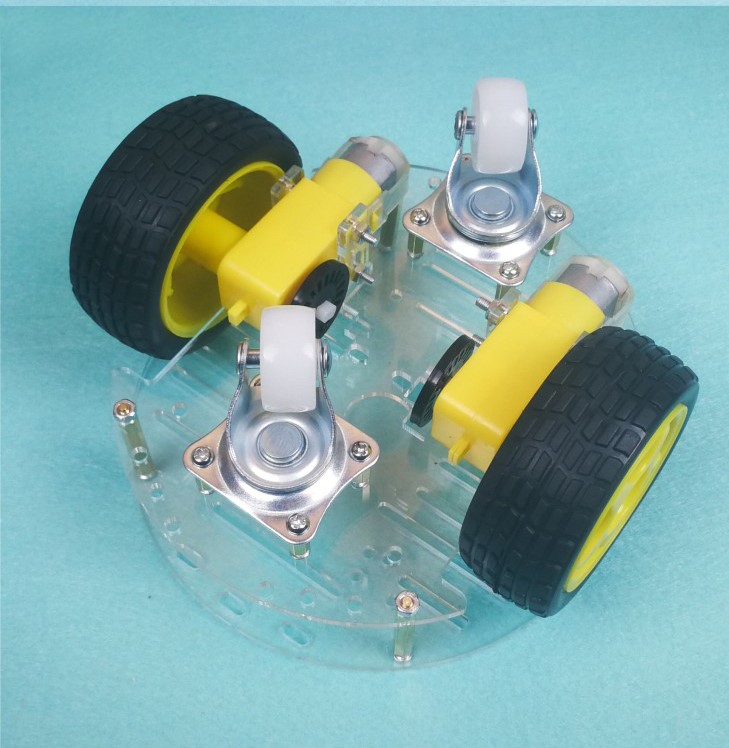
请根据体感自行调整导柱长度,我的下方2个万向轮处给的8根导柱过长,导致小车不能直行,于是手动将其磨短了4mm左右。
2、程序设计及写入
IDE的使用为Arduino官方的IDE,下载地址https://www.arduino.cc/en/Main/Software
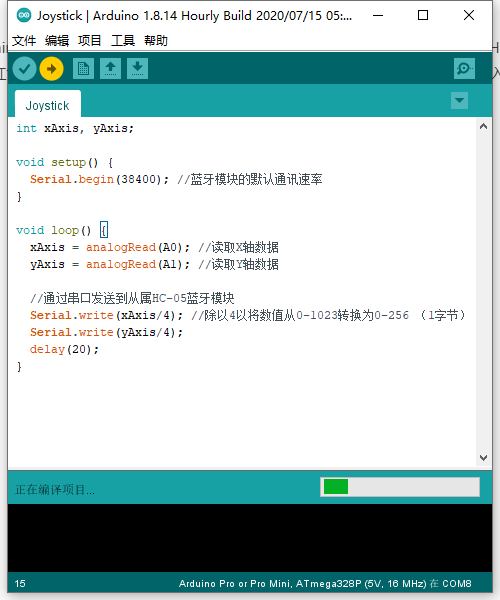
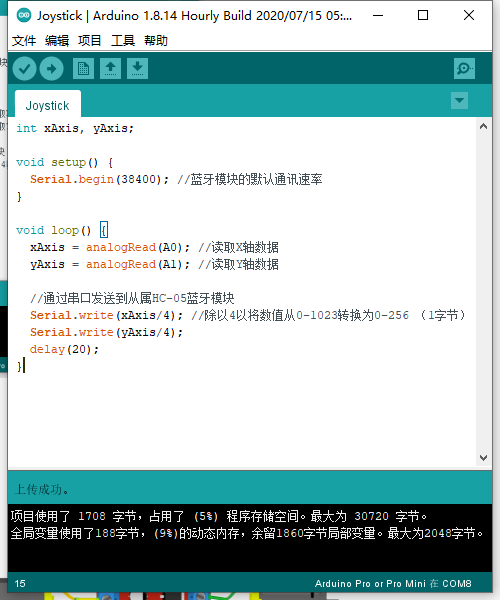
2.1 遥控器程序
int xAxis, yAxis;
void setup() {
Serial.begin(38400); //蓝牙模块的默认通讯速率
}
void loop() {
xAxis = analogRead(A0); //读取X轴数据
yAxis = analogRead(A1); //读取Y轴数据
//通过串口发送到从属HC-05蓝牙模块
Serial.write(xAxis/4); //除以4以将数值从0-1023转换为0-256 (1字节)
Serial.write(yAxis/4);
delay(20);
}通过将操纵杆X、Y轴的数值除以4,可以将其从0-1023转换为0-255之间的值,就可以通过蓝牙设备将其作为1个字节发送,这样易于从属设备接收。
2.2 小车控制程序
#define enA 10
#define in1 3
#define in2 5
#define enB 11
#define in3 6
#define in4 9
int xAxis, yAxis;
unsigned int x = 0;
unsigned int y = 0;
int motorSpeedA = 0;
int motorSpeedB = 0;
void setup() {
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
Serial.begin(38400); //蓝牙模块的默认通讯速率
}
void loop() {
//默认值,摇杆在中心位置时不移动,依据前面摇杆测试自行填写,摇杆之间可能会有所不同
x = 513 / 4;
y = 525 / 4;
//从蓝牙主设备读取数据,串行接收到2个字节的数据,即X轴、Y轴,使用 Serial.read 函数读取
while (Serial.available() >= 2) {
x = Serial.read();
delay(10);
y = Serial.read();
}
delay(10);
//将接收到的值从0-255转换成0-1023
xAxis = x*4;
yAxis = y*4;
//增加一点公差,并将470到550的值视为中心.如果向后移动摇杆的Y轴并且该值低于470,那么将两个电动机的旋转方向设置为向后,否则向前
//Y轴用于前进及后退
if (yAxis < 470) {
//马达A前进
digitalWrite(in1, HIGH); //此处的 LOW 和 HIGH 请根据你的马达接线方式自行调整
digitalWrite(in2, LOW);
//马达B前进
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
//将Y轴的下降值从470转换为0,将PWM值从0转换为255,即电动机的速度
motorSpeedA = map(yAxis, 470, 0, 0, 255);
motorSpeedB = map(yAxis, 470, 0, 0, 255);
}
else if (yAxis > 550) {
//马达A后退
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
//马达B后退
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
//将Y轴的上升值从550转换为1023,将PWM值从0转换为255,即电动机的速度
motorSpeedA = map(yAxis, 550, 1023, 0, 255);
motorSpeedB = map(yAxis, 550, 1023, 0, 255);
}
//如果摇杆在中心,则速度为0
else {
motorSpeedA = 0;
motorSpeedB = 0;
}
//X轴用于左转及右转
if (xAxis < 470) {
//将X轴的下降值从470转换为0,将PWM值从0转换为255
int xMapped = map(xAxis, 470, 0, 0, 255);
//左转:降低左马达速度,增大右马达速度
motorSpeedB = motorSpeedA + xMapped;
motorSpeedA = motorSpeedB - xMapped;
//将速度限制在0-255之间
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}
if (xAxis > 550) {
//将X轴的上升值从550转换为1023,将PWM值从0转换为255
int xMapped = map(xAxis, 550, 1023, 0, 255);
//右转:降低右马达速度,增大左马达速度
motorSpeedB = motorSpeedA - xMapped;
motorSpeedA = motorSpeedB + xMapped;
//将速度限制在0-255之间
if (motorSpeedA > 255) {
motorSpeedA = 255;
}
if (motorSpeedB < 0) {
motorSpeedB = 0;
}
}
//根据施加的电压和电动机本身,在较低速度下,电动机将无法开始运行,并且会产生嗡嗡声,此处实际上是将速度限制在了75-255之间
//PWM信号的值低于75,电动机将无法运动(可自行根据马达和电压不同调整)
if (motorSpeedA < 75) {
motorSpeedA = 0;
}
if (motorSpeedB < 75) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); //向马达A发送PWM信号
analogWrite(enB, motorSpeedB); //向马达B发送PWM信号
}2.3蓝牙模块的设置及配对
目前我们手里有两个HC-05蓝牙模块,我们需要将其中一个设置为主机,另一个设置为从机,来实现摇杆操控,为了实现这一点,我们需要在AT模式下使用AT命令。
在购买HC-05蓝牙模块时,卖家应该会发给你关于HC-05蓝牙模块的使用说明和蓝牙测试软件,如果没有,我这里有提供的材料
驱动及测试工具.zip
- 安装HC-05的驱动
- 将蓝牙模块按照接线图与USB转TTL连接(USB转TTL驱动)
- 按住蓝牙模块上的小按钮,连接电脑,如果蓝牙模块指示灯大约每2秒闪烁一次,则表明我们已成功进入AT命令模式
- 打开蓝牙测试软件,点击搜索端口,波特率38400,稍等一会就会显示端口(这里的端口可以在设备管理器查看,选择CH340对应的端口)
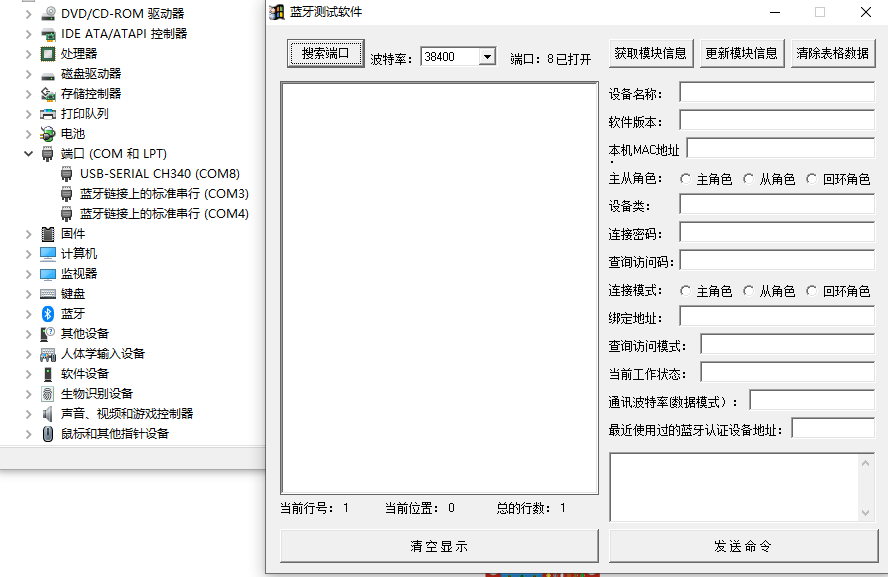
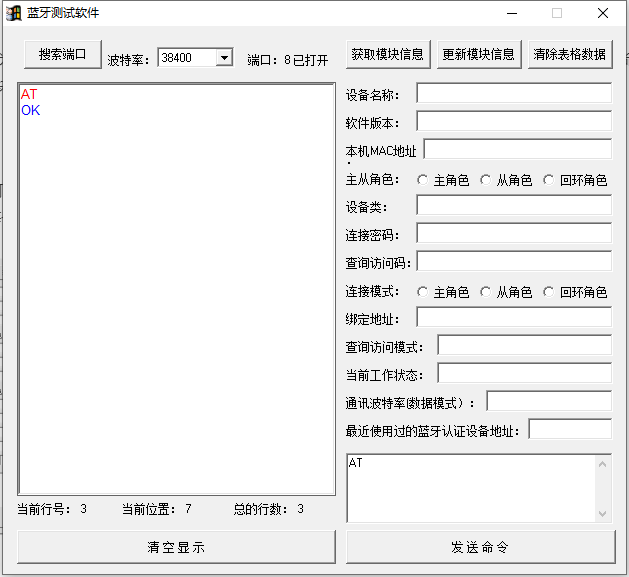
- 输入 AT 后敲一下回车,再点击发送命令,会回复 OK 代表我们已经在AT模式下了
- 首先,我们需要将两个蓝牙模块的串口波特率更改为38400,出厂时自带应该是9600,然后记下你要作为从机的蓝牙模块的地址
HC-05蓝牙模块出厂默认就是从机模式,配对码为1234(配对码可自行更改,但要确保主机和从机一致,指令集在上方附件中有提供),在此处,我们只需要将其中一个改为主机模式,然后通过绑定地址的方式让主机自动连接到从机。
以下为从机配置示例
AT
OK
AT+UART?
+UART:9600,0,0 //表示当前波特率为9600
OK
AT+UART=38400,0,0,\r\n //这里是兼容版的蓝牙模块,需要输入 \r\n 对于原装版的蓝牙模块不需要输入,直接输入 AT+UART=38400,0,0, 即可
OK
AT+UART?
+UART:38400,0,0
OK
AT+ROLE? //表示蓝牙模块处于从机模式
+ROLE:0
OK
AT+ADDR?
+ADDR:98d3:71:fdde39 //记下这个地址
OK_以下为主机_配置示例
AT
OK
AT+UART?
+UART:9600,0,0
OK
AT+UART=38400,0,0,
OK
AT+UART?
+UART:38400,0,0
OK
AT+ROLE?
+ROLE:0
OK
AT+ROLE=1 //设置为主机模式
OK
AT+CMODE=0 //设置为固定地址连接模式
OK
AT+BIND=98d3,71,fdde39 //绑定之前的蓝牙地址,注意,在填写地址时,我们需要使用逗号而不是冒号
OK这样,蓝牙模块的设置就完成了,断电后重新上电,两块蓝牙模块会自动配对连接
其他指令及详细说明请参阅上方附件中的HC-05指令集文档
2.4 程序写入
将USB转TTL与 mini pro 连接(连接mini pro只有6个排针那一侧的接口)
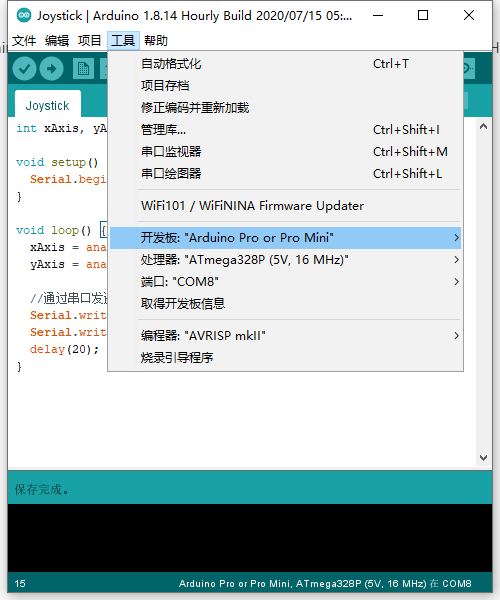
USB转TTL mini pro RXD TXD TXD RXD GND GND VCC VCC 打开arduino的IDE,将上方程序填入,在工具栏中,选择 Arduino Pro or Pro mini,选择处理器,比如我买的这一块是5V/16M,选择端口,对应端口为CH340的端口,可以在设备管理器找到
点击上传按钮,在下方状态栏从编译项目变成上传中,马上按下pro mini 上的红色复位键,这里要多次尝试确认时机,就会提示上传完成,这时程序就写入了pro mini 中了
依次将小车和遥控器程序分别上传到两块pro mini 中
3、电路连接
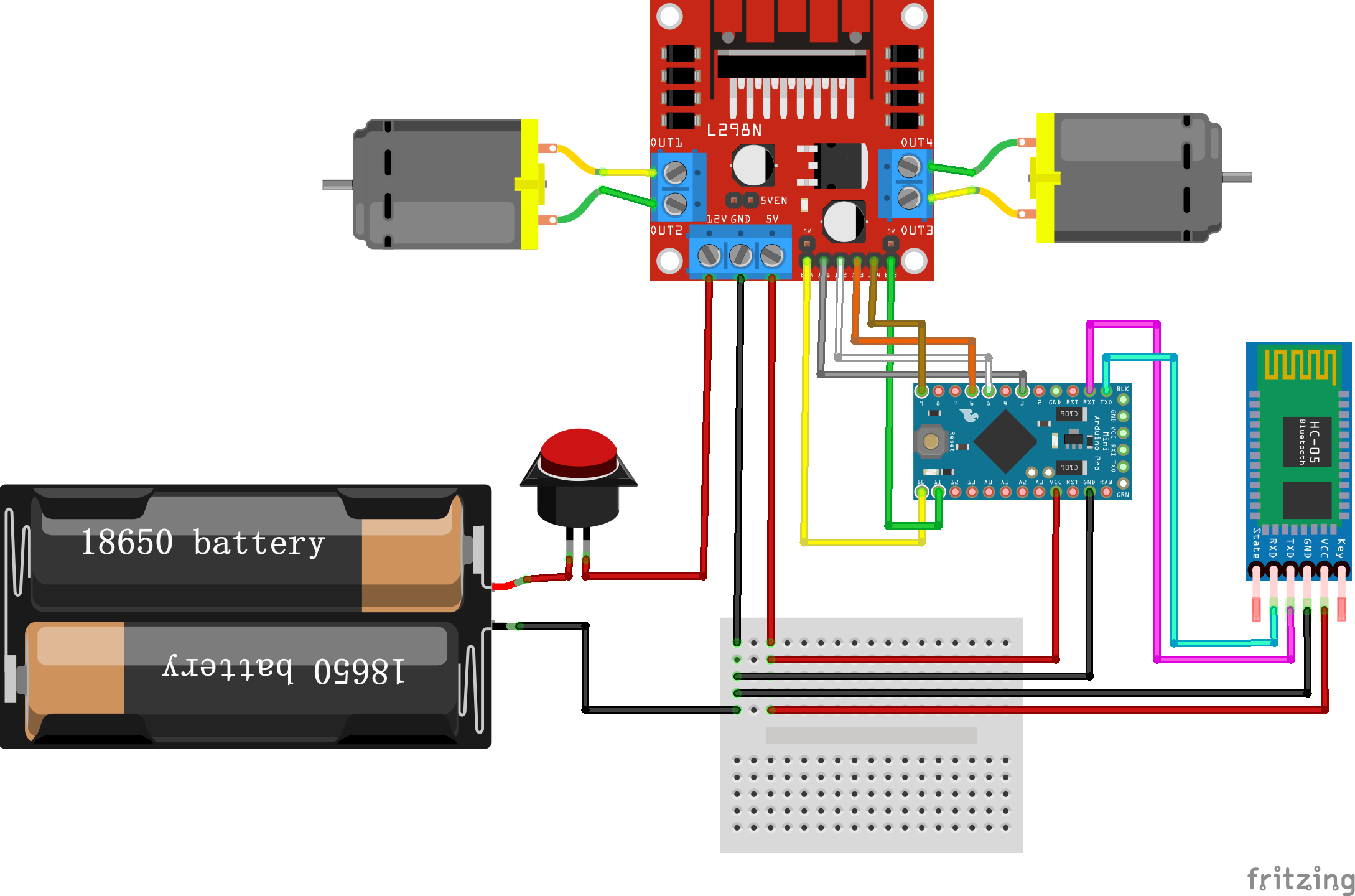
3.1小车接线图
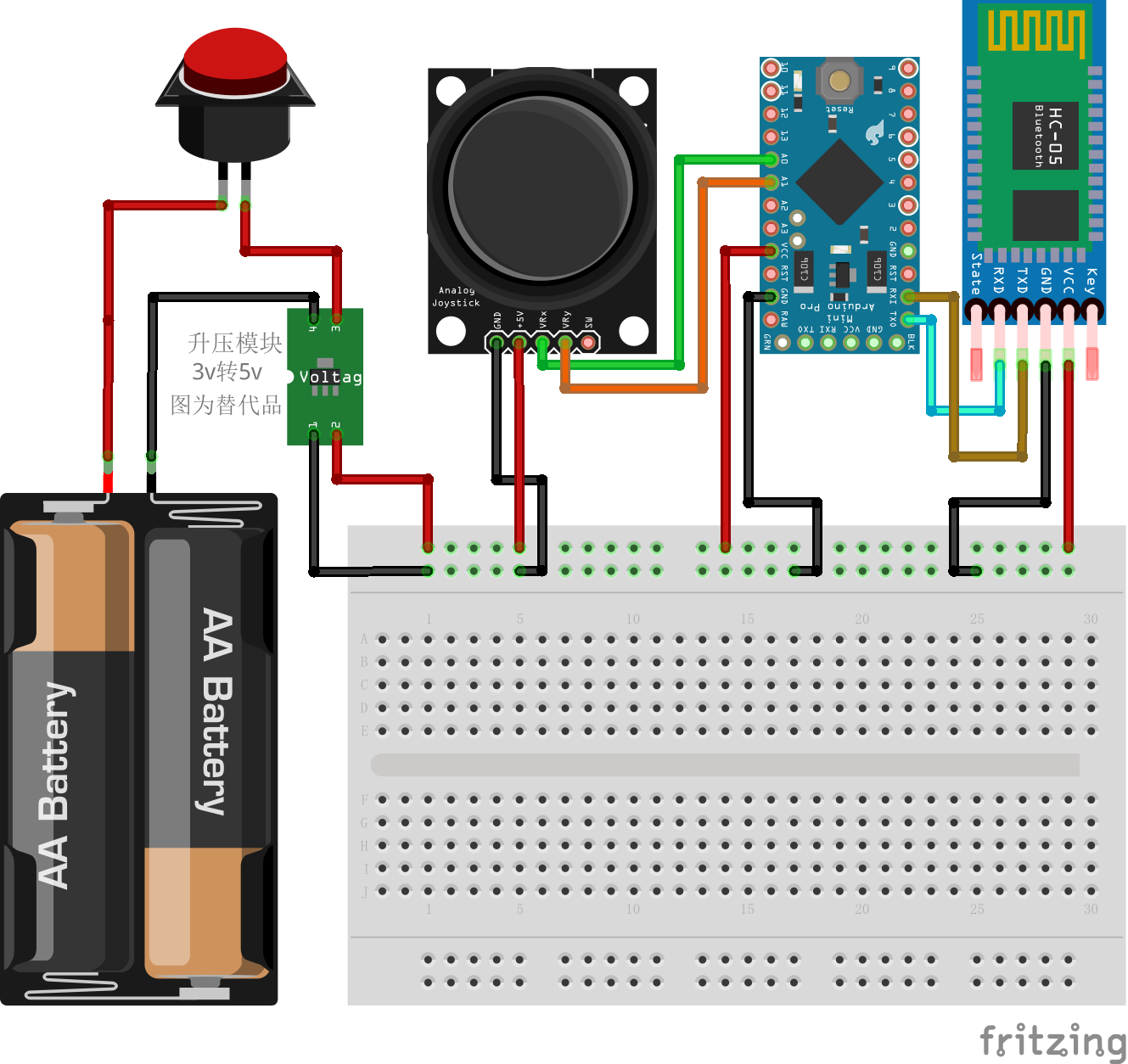
3.2遥控器接线图
4、安装
实际中,我这里马达out3 和out4 接线交换了一下,即out3为黑线 out4 为橙线,若出现左右转相反请自行修改代码
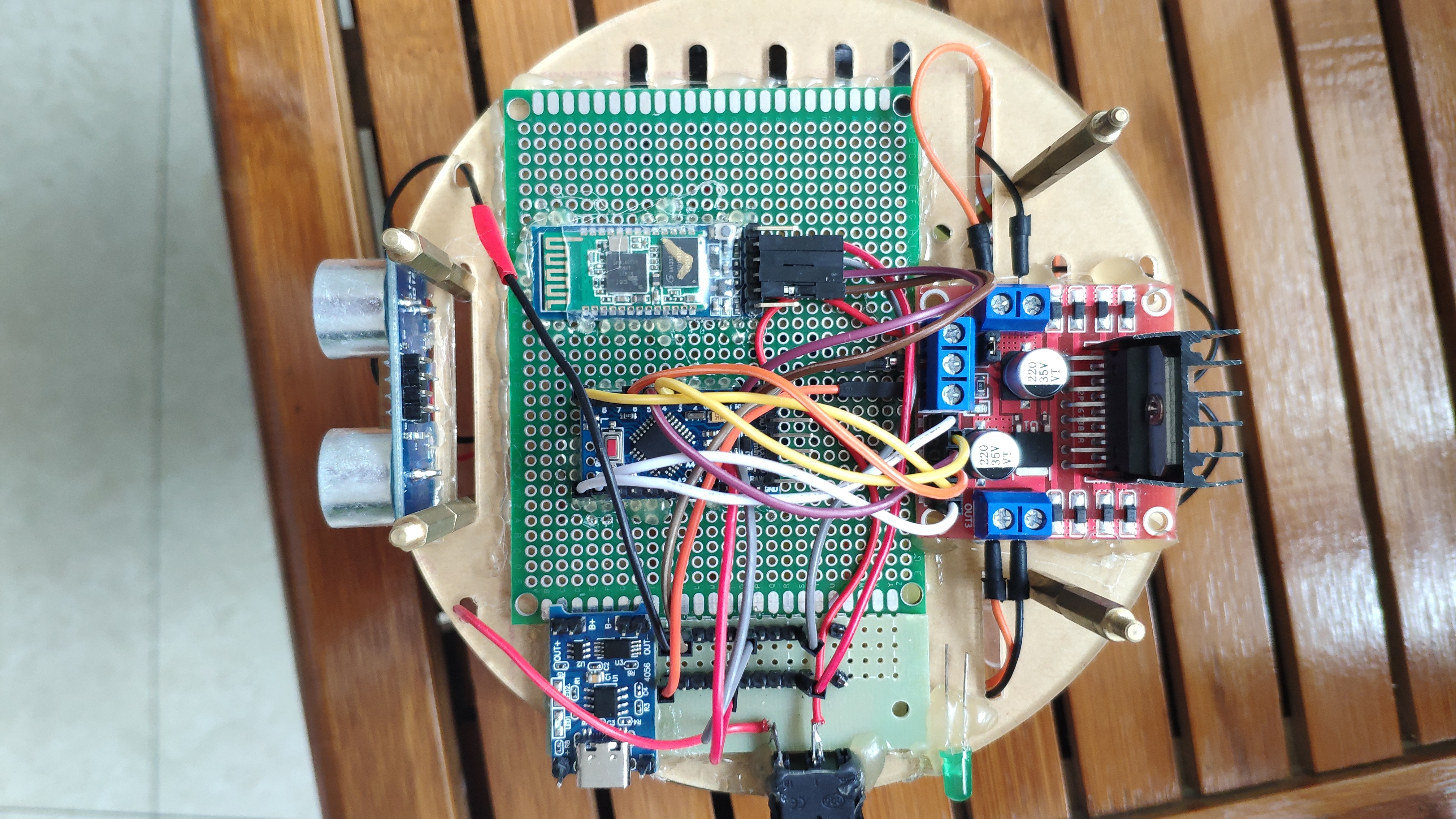
5、总结
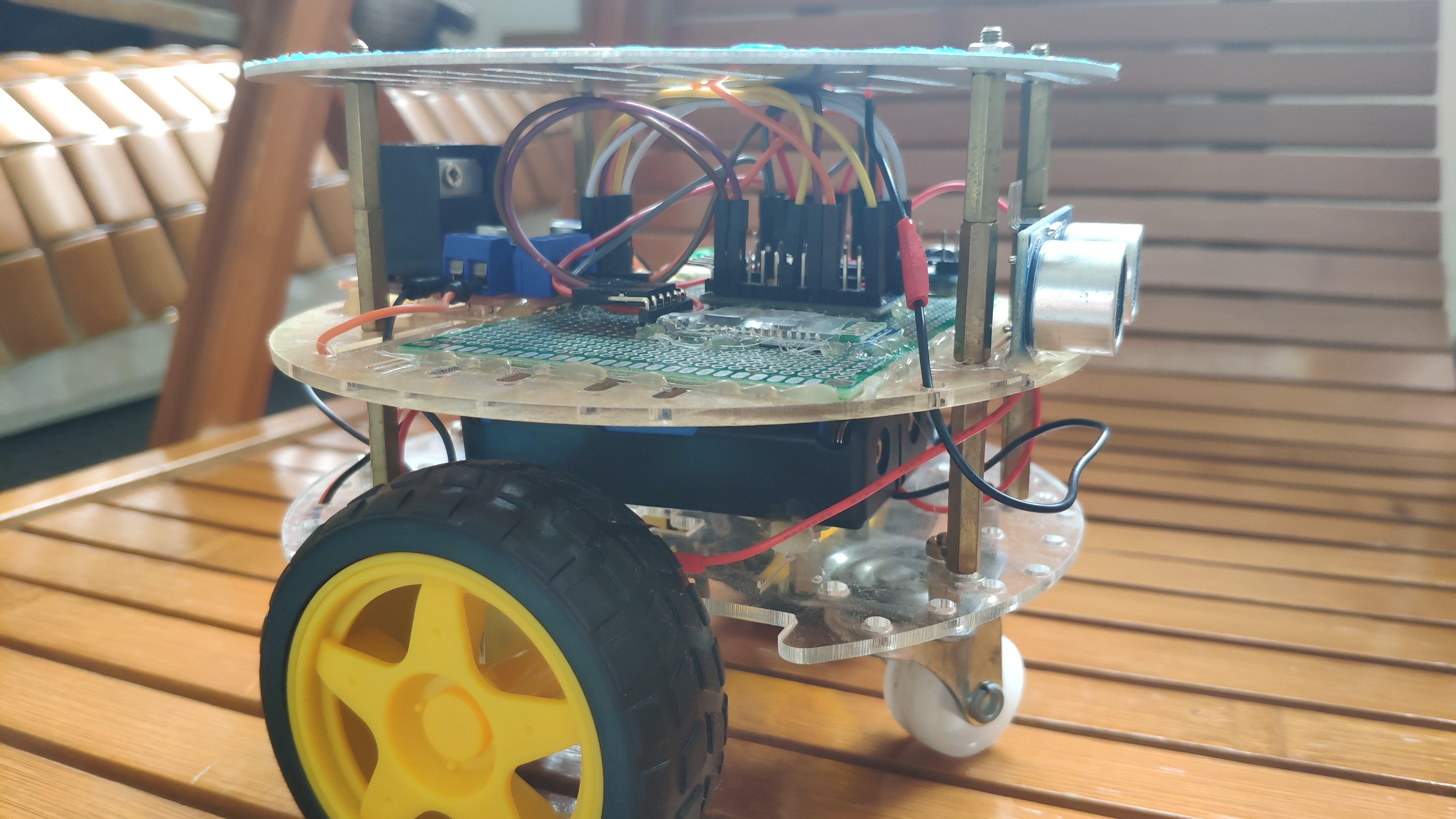
本来是打算全都用洞洞板连接,结果实际操作时发现不太好设计,于是就只是做了一个固定作用。其实可以不用洞洞板,只需要使用热熔胶固定即可,
图片左下方的是充电模块,因为一开始设计的时候,是打算两个电池并联,通过充电模块,再通过升压模块来给小车提供电源,但是实际使用时发现 3.7V转12V迷你DC-DC升压模块 出现问题,无法提供足量的电流,导致启动正常,电机运动会立刻断电
左侧的HC-SR04超声波模块 因为是发现升压模块出问题后重新修改的代码,并没有将其加入。
下方的是电源供给,将排针固定在了一小块洞洞板上,下方焊接在一起,接入电源的正负极即可。
至于遥控器,因为我没有找到合适的盒子来放置摇杆,目前是在面包板上使用,只是一个原型。
Todo
- 摇杆外壳
- OLED屏幕显示
- 更好的充电方式
- 全自动避障模式
- 声音控制

